道路性状の簡易評価システム
Dynamic Response Intelligent Monitoring System (DRIMS)
開発の背景
わが国を初めとするインフラ整備先進国の道路は延長の途にあるものの,維持管理の時代へと確実に移行している.交通荷重を繰り返し受ける舗装路面は損傷を生じやすく,車両走行性の低下や周辺の居住環境の劣化につながるだけでなく,交通事故の原因となるケースも少なくない.そのため,路面状態を定期的かつ即時的に把握し,維持管理することは非常に重要な課題である.途上国においては,予算や技術者能力の制約から劣化の著しい道路も多く,適切な維持管理が求められる一方で,依然として建設の時代である.新設直後やその後の路面状態を把握することは良質な道路インフラを築き上げていく上で不可欠である.
従来の路面の診断・点検は,主に検査員の目視と路面性状測定車によって行われる.前者は特別な機器を要しない簡易で即時性に優れる点検であり,現在の点検業務の大部分を占めているが,その精度は点検者の経験や知識,技量に依存し,定性的評価にとどまる.後者は,定量的で高精度な診断が可能であるものの,初期導入費,運用費ともに非常に高額であり,また,データ収集や処理に時間を要し即時性に欠ける.
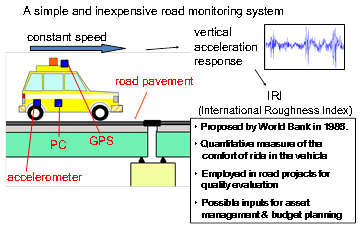
これらの背景から,簡易で定量的かつ高精度に路面状態を診断・評価可能なモニタリングシステムの構築と確立が強く望まれる.路面性状を客観的に評価する方法としては,レーザーや接触式ローラーなどを利用して路面プロファイルを直接測定する方法と走行車両の動的応答を測定する方法がある.我々は,高速道路の多数の日常巡回車などに搭載し,高頻度に計測することを想定し,一般車両の鉛直加速度応答を利用した移動路面モニタリングシステム(Dynamic Response Intelligent Monitoring System,以下DRIMS)を開発した.既往の手法と異なり,車両の改造を必要としない,極めて安価で簡便なシステムである.
DRIMSの開発
加速度計,GPS受信機,小型PCを搭載した一般車両が定速走行する際の動的応答を,その代表値である鉛直加速度によって把握し,路面のラフネスをInternational Roughness Index(IRI,国際ラフネス指数)を指標として評価する.道路点検車として使われることの多いランドクルーザー(トヨタ社製)で,60km/hでの定速走行を基準として開発してきたが,車両キャリブレーションおよび速度キャリブレーション手法の開発により,車両,走行速度の違いを補正してIRIを推定できる.さらに,近年普及が進むスマートフォンを利用した計測も実現している.操作部と計測部が一体化したスマートフォンは,その設置場所によっては操作性,簡便性が大きく損なわれるが,本システムは角速度計測を利用することでスマートフォンの設置場所の自由度を大きく向上している.DRIMSの主な特色は次の通りである.
1)小型で安価
バネ上加速度のみを利用してIRIを推定するため,計測の仕組みが簡便で,小型で安価なシステムとなっている.車両内にセンサを設置するのみで,車速パルスなども利用しない.車両改造が不要で,配線も簡易である.バネ上角速度計測を利用するスマートフォン版は,スマートフォンを車内に固定するのみである.類似システムには,バネ下加速度を計測する必要のあるものが多い.
2)使用車両,走行速度の違いを補正してIRIを推定可能
小型ハンプを乗り越えるときの応答を利用して車両のバネ特性を推定,補正する.専用車両が不要である.タイヤやサスペンションの交換,さらには車両交換時にも,キャリブレーションをすればIRI推定ができる.類似システムには,計測車両や走行速度の違いが補正できないもの,IRI推定精度が低いものが多い.

DRIMS概要 DRIMS計測機器
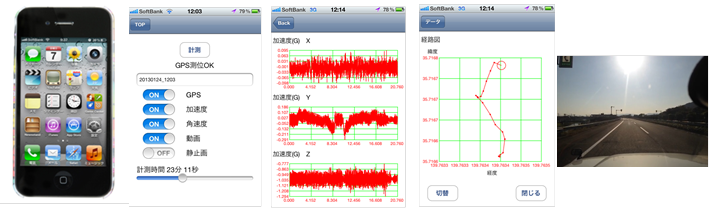
スマートフォン版DRIMS
DRIMSの国際展開
これまでに中国,タイ,フィリピンでのDRIMS計測を行ったり,JICAの技術プロジェクトを通して,キルギス共和国,ケニア共和国,南スーダンなどにDRIMS導入をしたりしている.
ケニア共和国への展開
2012年2月,7月にケニア共和国で実施したDRIMSの紹介と技術指導は,JICAケニア事務所の調整の下,多大なサポートをいただき,さらにこれまでアフリカへの技術移転に取り組んできた京都大学の大島義信准教授との協力により実現したものである.JICAが行う開発途上国への技術協力では,わが国のプレゼンスを高めるための努力や工夫がなされており,ケニアの道路管理システムも支援されてきたが,その中でDRIMSの活用が積極的に推進され,開発に携わった大学関係者自身がケニアに赴き技術指導する機会を得たのである.


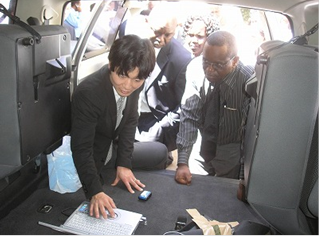
ケニア共和国で行ったワークショップと実車デモ
およそ一週間に及ぶ滞在ではまず,ケニア高速道路公社(Kenya National Highway Authority; KeNHA)やその地方組織を始め,中央,地方で道路管理に携わる組織,JICA関係者など約50名の参加者を得てワークショップを開催した.DRIMSの技術的背景や導入事例,維持管理における位置づけなどを説明すると共に,現地入り直後に計測した道路調査結果を示した(図-2,図-3).道路管理に直接携わる技術者からの盛んな質問に答える一方で,学生らはデモ走行に出発した.デモ走行車が会場に戻ると,計測したばかりの周辺道路のIRIを算出して示し,迅速な調査を印象づけることとなった.
次いで,KeNHA側技術者らとともにケニア国内の幹線道路計300km以上の計測を行った.機器の設置から計測,データ処理に至るまで,現地技術者に囲まれての実施で,ダイレクトにフィードバックを受けることとなった.技術的な詳細や,データ処理の仮定,応用時に想定される問題など,質問は多岐にわたり,深い理解に基づくものも多くあった.測定したばかりの路線について,休憩時間にIRI推定結果を提示すると,車内で体感した乗心地と整合的である,といった反応が返ってきた.IRIを体感として即座に理解できる程度に認知度は高いようであった.体感と異なるIRIがDRIMSで算出されたら,と心配をしていたため安堵した瞬間であった.
技術者らは技術習得に熱心で,幹線道路の計測2日目には,現地技術者のみで走行・計測,データ処理を行うほどであった.DRIMS車両の前で,システムを流暢に説明し,質問にまで応じていた.
ワークショップやデモ走行を経て,利便性と活用度が認められたDRIMSを,ケニア政府は自己資金で購入することを決めた.JICAによると,これはあまり例がないとのことである.KeNHAでは1万4千kmに及ぶ幹線道路のIRI計測を実施予定で,高精度プロファイラの導入との比較検討した上で,DRIMSを選定したと聞いている.今後,ケニアでDRIMS活用が進むとともに,ケニアの関係者の中では「日本からの支援」が強く印象付けられることになるだろう.この背景には次の2つの要因があると考えている.
まず,ケニア側で道路管理をする体制が整っていたことが挙げられる.目視点検による道路性状評価がこれまでにも行われており,路線番号,舗装種別などとともに,データベースにまとめられている.KeNHAの地方組織を訪れた折には紙ベースの管理台帳に路面状態を手書きで記入したものを見る機会があった.技術者には,道路劣化プロセスや維持管理手法だけでなく,IRIなどの指標やデータベースなどのシステムに詳しい人材もおり,管理の中に客観的評価指標をいかに組み入れるかという段階であった.このような背景やニーズをJICA事務所で把握し,調整いただいたことは大きな要因である.もちろんケニア側の体制醸成の背景には,これまでのJICA事業や,京都大学らと現地ジョモ・ケニヤッタ農工大学との交流などの取組みがあることは言うまでもない.
次に,DRIMS自体のインパクトとそれに対する信頼感が挙げられる.道路省材料試験所などの事務所を訪れた折には,機器一式を中程度のビニール袋から取り出し,ノートパソコンに接続して加速度,GPSデータをリアルタイムに表示すると,その小ささと簡便さのインパクトは大きかったようである.小型携帯性について強いて言えば,ノートパソコンと共に携帯用ハードディスクドライブ2−3個を同時に持ち歩いている程度と考えてよいであろう.価格についても,ハードウェアはノートパソコン2,3台分程度である.計測が終われば休憩時間中に結果が表示できるほどデータ処理も簡便である.さらに,ケニアでは応答型ラフネスメーター(ARRB 社製Roughometer III )が既に導入されていたが,ある路線でこれとVMS2台でIRI推定をし現地技術者の目前で結果をつきあわせたところ,3者は互いに整合的で,信頼感を得られたと考えている.走行速度やタイヤ通過位置の違いによる車両応答の違いについて詳細な質問を受けるなど,DRIMSの有効性を技術的にも吟味しているようであったが,これまでの研究成果を踏まえた答えを示せたと考えている.
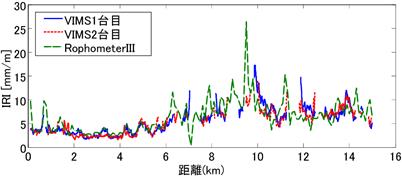
DRIMSとRoughometer IIIの比較
その後,KeNHAでは計10セットのDRIMSを購入し,10台の車両にキャリブレーションを施し,地方事務所がそれぞれ管轄する国道の路面性状を調査した.同国の国道のIRI値がDRIMSにより初めて明らかになった.
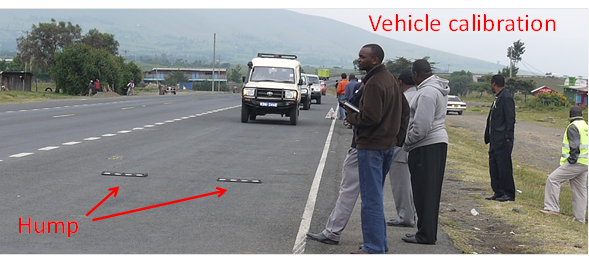
車両キャリブレーションの様子
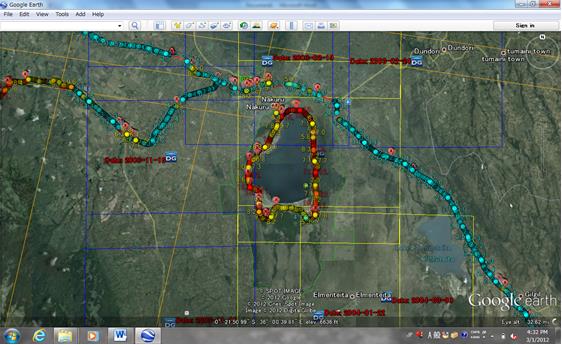
IRI推定値のマップ表示

ケニア共和国国道のIRIマップ (KeNHA)
一方で,DRIMSの導入段階から,継続利用とそれに基づいた道路管理へと繋げる次のステップも欠かせない.導入はされても継続利用されない技術も多い.前述の応答型ラフネスメーターはケニア国内に導入されていたものの,頻繁に路面性状調査に利用されていたわけではない.他国において長い間利用されず放置されている例も聞いたことがある.車軸に取り付ける形式のラフネスメーターは,設置にジャッキアップが必要で手間がかかったり,走行速度と車両が限定されたりすることがその一因であるようだが,現地技術者の習熟度,データベースや管理サイクルへの取込みなども考慮して,JICAケニア事務所と協力しながら継続的な支援を行ないたい.
DRIMSの研究開発
地方自治体が管理する長大トラス橋の路面性状調査 (長岡技術科学大学 宮下剛准教授)
対象橋梁は,新潟県長岡市の信濃川に架かる長生橋である.本橋は,1937年に供用が開始された,橋長が850.8m,13径間の下路式の鋼ゲルバートラス橋であり,新潟県が管理する.

対象橋梁(長生橋)
軽自動車にDRIMSを搭載して,本橋の路面性状調査を実施した.ただし,自由交通流下の計測であるため車速は一定ではない.計測された時刻歴波形の一例を示す.図中のHはゲルバーヒンジを表し,矢印の先にあるピークは車両が伸縮装置を通過したときの加速度応答である.ゲルバーヒンジは上弦材にあり,ゲルバーヒンジの直下に伸縮装置がある.A1からH1間,H1からH2間,H2からH3間などとして,ピーク間の加速度RMS(二乗平均平方根)を算出した.
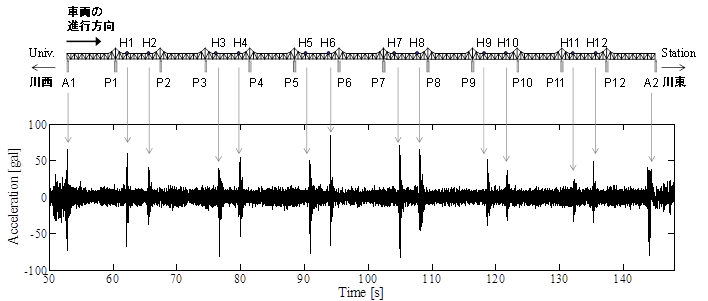
時刻歴波形の一例
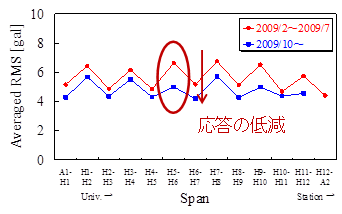
次に,2009年2月から7月までの間(期間1)の断続的な計測を通じて算出された加速度RMSの平均値と2009年10月以降(期間2)の断続的な計測を通じて算出された加速度RMSの平均値を示す.期間1と期間2のデータ数は,それぞれ61データと15データである.
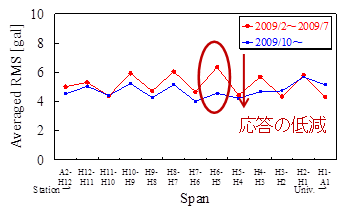
(a) 川西から川東(大学から駅) (b) 川東から川西(駅から大学)
各区間の加速度RMS
これより,伸縮装置間の距離が短いH1からH2間などで加速度RMSが大きくなっていることが分かる.また,期間2の結果は期間1の結果と比較すると,車速の影響やサンプル数の相違などが原因と思われるが,全体的に加速度RMSが小さくなっているものの,特にH5からH6間の加速度RMSが小さくなっていることが分かる.これは,期間1では,写真(a)に示すように,H5の位置にある伸縮装置の段差量が大きかったが,期間2では,写真(b)に示すように,伸縮装置の段差が樹脂モルタルで補修されたことによる.このように,DRIMSを利用することで,路面性状として伸縮装置の状態を評価することができる可能性が示唆される.


(a) 補修前 (b) 補修後
伸縮装置(H5)
開発の経緯とDRIMSコンソーシアムの設立
DRIMSは東京大学橋梁研究室において,平成13年にVehicle Intelligent Monitoring System (VIMS)としてプロトタイプを開発し,その後,卒論生,修論生が推定原理の改良,車両キャリブレーション手法の改良などに,ニチレキ社や首都高速道路公団などの協力のもと取り組み,改善を積み重ねてきた.近年では,京都大学,長岡技術科学大学,長崎大学や道路会社などと連携しコンソーシアムを組織して,開発,国際展開を進めている.開発途上国への導入も進みつつ有り,これまでに中国,タイ,フィリピンでの計測を行ったり,JICAの技術プロジェクトを通して,キルギス共和国,ケニア共和国,南スーダンなどに導入されたりしている.平成26年にはDRIMSを商標登録し,国内外への展開を進めている.以下に,経緯を示す.
平成13年
Ø 東京大学橋梁研究室でプロトタイプを開発
Ø 福山(卒論):加速度計,GPS,PCを利用したプロトタイプを開発
平成14年
Ø 河野(卒論):プロトタイプを利用して応答RMSベースで路面を評価
Ø 特許出願(藤野陽三教授,首都高,首都高技術センター)
平成15年
Ø 下園(卒論)車両振動に着目した軌道モニタリングシステムの開発
平成17年
Ø 国土交通省建設技術研究開発助成制度「巡回車による舗装・伸縮装置の高頻度簡易診断に関する研究開発」(代表 藤野陽三教授)
平成18年
Ø 古川(修論):車両加速度応答からIRIとジョイント段差量を推定するアルゴリズムの開発.Google Mapと統合した道路維持管理データベースの開発
平成19年
Ø 朝川(卒論):ランダム振動理論を用いたIRI推定精度の向上
平成21年
Ø 朝川(修論):フィリピン,キルギスへの国際展開.ハンプを利用した簡易車両キャリブレーション法の開発
平成22年
Ø 矢野(卒論):ハンプを利用した車両キャリブレーション手法の高度化
Ø 入江(卒論):ステレオ撮影を利用した路面形状の3次元再構築
Ø 三輪(卒論):画像処理によるジョイント検知と走行速度推定
平成23年
Ø 高橋(修論):ハンプ試験と走行試験を組み合わせたハイブリッドキャリブレーション手法開発
平成24年
Ø 嶋田(卒論):定速走行試験から自由走行試験への拡張
Ø 東京大学,京都大学共同で,ケニア共和国への展開
平成25年
Ø 宮嶋(修論):キャリブレーション手法の簡易化
Ø 木村(卒論):角速度ベースのIRI推定法の開発,スマートフォンを利用したIRI推定
Ø 特許出願(角速度応答を利用したIRI推定.長山,木村)
Ø VIMSコンソーシアム設立.東京大学の他,京都大学,長岡技術科学大学,長崎大学,道路会社などをメンバーとしたVIMSコンソーシアムを設立し,組織的に開発,国際展開を諮る.
Ø JIPテクノサイエンス社を通じて販売開始
平成26年
Ø DRIMS(Dynamic Response Intelligent Monitoring System)を商標として登録.従来VIMSとして研究開発してきたものをDRIMSとして広く国内外へ展開を図る.コンソーシアム名もDRIMSコンソーシアムに変更.
DRIMSコンソーシアム
・平成13年より東京大学橋梁研究室で継続して行われてきたDRIMS(旧称VIMS)に関する研究および藤野陽三教授・首都高・首都高技術センターが提出した特許の経緯を踏まえる一方で,その後,長岡技科大,京都大学,長崎大学で継続・展開されている研究成果を鑑み,DRIMS開発に携わる者がそれぞれの貢献度を明確にして研究開発,国際展開に取り組めるよう情報交換・協議の場を設ける.
・開発技術の展開が進むにあたり,DRIMS導入にあたってニーズや問題点が明らかになりつつある.それらは導入する地域や事業者に固有のものがある一方で,共通するものもある.コンソーシアムを通じてニーズや問題点を共有して効率的に技術の開発・普及に結びつける.
・DRIMS開発者が互いに研究・開発成果を共有することで技術展開を促進する.DRIMSコンソーシアム参加者(開発メンバ)は,開発成果を原則1年後に共有することとする.共有したプログラムをDRIMSコンソーシアム参加者(開発メンバ)は自由にカスタマイズし,使用できる.
コンソーシアム会員
コンソーシアム会員は,大学等の研究者を主とする開発会員と,社会への展開や実装を主に行う非開発会員からなる.
開発会員
大島 義信 京都大学 准教授
長山 智則 東京大学 講師
西川 貴文 長崎大学 助教
宮下 剛 長岡技術科学大学 准教授
JIPテクノサイエンス社
非開発会員
阪神高速道路公団,首都高速道路公団,首都高技術,首都高速道路技術センター,ニチレキ,建設技術研究所インターナショナル
・会員は,DRIMSコンソーシアムに参加し,相互にコンサルティングを受けることができる.
・会員(開発メンバ)は,開発成果(プログラムソースコードを含む)を原則1年後に共有する.共有したプログラムを自由にカスタマイズし,使用出来る権利を有する.最新版や以前のバージョンを入手・使用できる.
・一般ユーザはウェブフォーラムを通じて,サポートを求めることができる.
主な関連文献
1) 木村俊也,長山智則,藤野陽三:スマートフォンによる角速度計測を利用したVIMS の汎用化と路面の局所変状評価,第68回土木学会年次学術講演会概要集,V-472, 2013.9.
2) 宮嶋瑛,長山智則,蘇迪,藤野陽三:発展途上国への展開を目指したVIMS 走行速度キャリブレーションの簡易化,第68回土木学会年次学術講演会概要集,V-473, 2013.9.
3) Nagayama, T., Miyajima, A., Kimura, S., Shimada, Y., and Fujino, Y. “Road condition evaluation using the vibration response of ordinary vehicles and synchronously recorded movies,” Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2013, Proc. of SPIE volume 8692, San Diego, USA.
4) 山本亨輔,大島義信,金哲佑,杉浦邦征:車両応答データの特異値分解による橋梁損傷検知技術の提案と検討,構造工学論文集,Vol.59A,320-331, 2013.3.
5) 朝川 皓之, 長山 智則, 藤野 陽三, 西川 貴文, 秋本 隆, 和泉 公比古:一般車両の走行時動的応答を利用した舗装路面の簡易状態評価システムの開発,土木学会論文集E1,68(1) pp.20-31,2012
6) 長山智則,高橋寛臣,狩野正人,家入正隆:スマートフォンを利用した路面性状評価システムの開発,第67回土木学会年次学術講演会概要集,V-308,2012.9.
7) 嶋田優樹,長山智則,藤野陽三:車両の自由走行応答を利用したVIMS によるIRI 推定法の提案,第67回土木学会年次学術講演会概要集,V-317,2012.9.
8) 大島義信,長山智則,宮嶋瑛,西林素彦,梁取直樹:IRI MEASUREMENT BY VIMS: CASE STUDY IN KENYA,第67回土木学会年次学術講演会概要集,CS4-001, 2012.9.
9) Heng Salpisoth,大島義信,河野広隆:実測データに基づくカンボジア道路舗装のIRI 予測法に関する検討,土木学会論文集E1, Vol.68, No.3,I_139-I_146,2012.
10) 三輪陽彦,西川貴文,長山智則,藤野陽三:路面診断のための多目的画像処理と簡易路面診断システム(VIMS)の統合,第66回土木学会年次学術講演会概要集,VI-240,2011.9.
11) ラオマニット ジットボーン,藤野陽三,長山智則,片岡慶太:Improved position identification method of Train Intelligent Monitoring System to assess track conditions,第65回土木学会年次学術講演会概要集,IV-205,2010.9.
12) 朝川皓之,藤野陽三,長山智則,西川貴文: Vehicle Intelligent Monitoring Systemの海外展開へ向けたキャリブレーション手法の確立,第64回土木学会年次学術講演会概要集,V-053,2009.9.
13) 長山智則,藤野陽三: 高速道路の高頻度路面モニタリングシステム(VIMS),検査技術,13(1),pp.41-47,2008.1.
14) 長山智則,藤野陽三: 路面モニタリングシステムの開発 車両応答を利用した簡易路面モニタリングシステムの開発,舗装,43(6), pp.3-5,2008.6.
15) Furukawa, T., Fujino, Y., Kubota, K. and Ishii, H.: Real-time Diagnostic System for Pavements Using Dynamic Response of Road Patrol Vehicles (VIMS), 3rd International Conference on Structural Health Monitoring of Intelligent Infrastructure (SHMII-3), Vol.3, 2007.
16) 石井博典,久保田慶太,藤野陽三:車両を用いた移動風速モニタリングに関する基礎的検討,土木学会第61回年次学術講演会,2006.9.
17) Fujino, Y., Kitagawa, K., Furukawa, T. and Ishii, H.: Development of Vehicle Intelligent Monitoring System (VIMS), Smart Structures & Materials/NDE Joint Conference, SPIE 2005, CD-ROM.
連絡先